Rovina, do které promítáme (rovina papíru, rovina školní tabule), se nazývá axonometrická průmětna (značíme \(\alpha\)). Tato rovina není rovnoběžná s žádnou souřadnicovou osou (\(\alpha \not\parallel x\), \(\alpha \not\parallel y\), \(\alpha \not\parallel z\)). Objekty (např. bod \(K\)) promítáme kolmo do axonometrické průmětny. Tomuto průmětu \(K^{a}\) říkáme axonometrický průmět bodu K.
Obrázek 2.1: Průměty bodu v axonometrii
S pouhými axonometrickými průměty si ale nevystačíme. Aby bylo zobrazení jednoznačné, použijeme ještě axonometrické půdorysy zobrazovaných objektů (viz bod \(K_{1}^a\) na obr. 2.1). Axonometrickým půdorysem je axonometrický průmět prvního průmětu (pravoúhlého průmětu do půdorysny). Pro zjednodušení budeme axonometrické průměty bodů popisovat bez horního indexu a, tedy axonometrický průmět \(K^{a}\) bodu \(K\) označíme jednoduše písmenem \(K\) (obr. 2.1 vpravo).
Nyní můžeme říci, že pravoúhlá axonometrie je vzájemně jednoznačné zobrazení bodů prostoru na uspořádané dvojice průmětů.
Obrázek 2.2: Pomocné průměty bodu
Podobně jako axonometrické půdorysy můžeme zobrazit i axonometrické nárysy a axonometrické bokorysy, viz body \(K_2\), \(K_3\) na obr. 2.2.
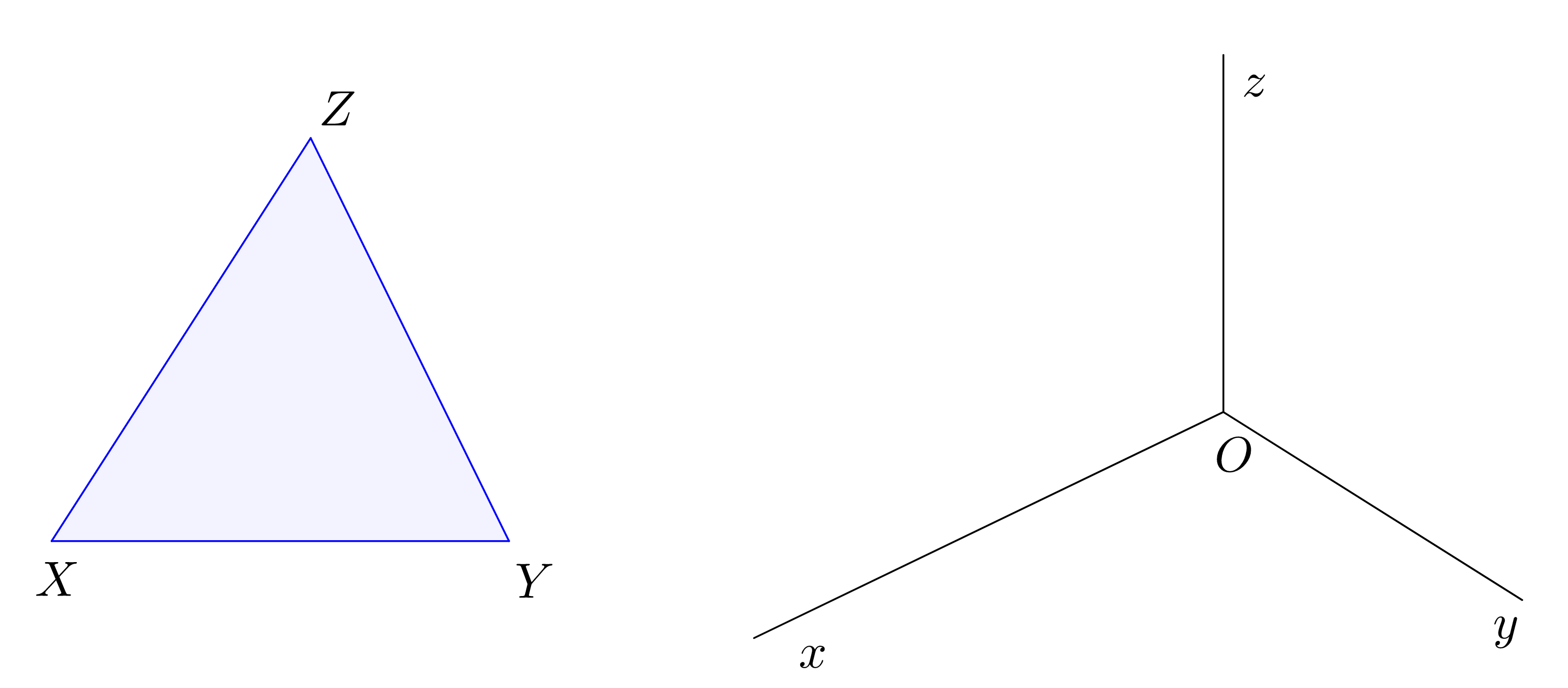
Obrázek 2.3: Axonometrický trojúhelník, axonometrický osový kříž
Axonometrická rovina je dána axonometrickým trojúhelníkem (\(\triangle XYZ\)), který vymezují průsečnice axonometrické roviny se souřadnicovými rovinami. Axonometrický trojúhelník je ostroúhlý.
Pravoúhlou axonometrii můžeme zadat axonometrickou rovinou nebo axonometrickým osovým křížem, tedy axonometrickými průměty os \(x\), \(y\), \(z\) (obr. 2.3).
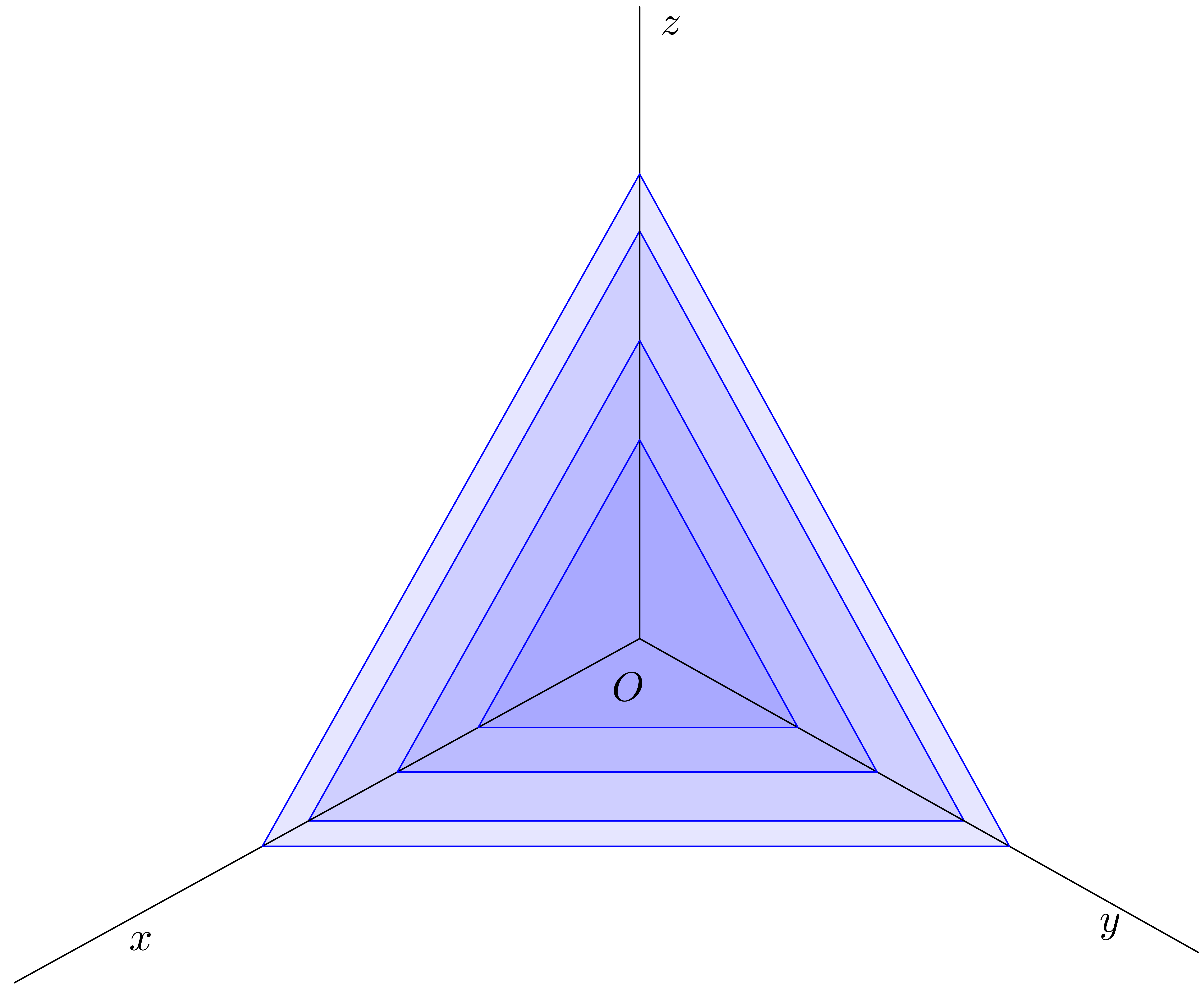
Obrázek 2.4: Axonometrické trojúhelníky pro jeden axonometrický osový kříž
Axonometrický osový kříž je tvořen výškami axonometrického trojúhelníku. K zadanému axonometrickému trojúhelníku jsme tedy schopni sestrojit axonometrický osový kříž. Stejně tak, máme-li axonometrický osový kříž, můžeme pomocí kolmic k průmětům os sestrojit libovolný axonometrický trojúhelník. Na jeho velikosti nezáleží - všechny tyto trojúhelníky jsou podobné a reprezentují navzájem rovnoběžné axonometrické roviny (obr. 2.4).
Obrázek 2.5: Axonometrický nadhled, axonometrický podhled
V axonometrii rozlišujeme axonometrický nadhled (obr. 2.5 vlevo) nebo axonometrický podhled (obr. 2.5 vpravo). Axonometrický podhled volíme, chceme-li zobrazit situaci zespodu. V tomto případě leží počátek soustavy souřadnic před axonometrickým trojúhelníkem a kladné poloosy se „rozbíhají dozadu“. Ve většině případů se ale používá axonometrický nadhled, kde počátek leží za axonometrickým trojúhelníkem.
V našich konstrukcích se omezíme pouze na axonometrický nadhled. V zadání úloh tedy nebudeme uvádět, že jde o nadhled, budeme to ale předpokládat.