Výklad učiva je proložen ilustracemi a úlohami k procvičení. Úlohy jsou zadány v centimetrech. Lze je rýsovat na papír formátu A4 na výšku. Zadání úloh začíná umístěním bodu \(X\) na papír. Zápis \(X\)[3-7; 4-13] udává, že bod \(X\) je třeba umístit 3-7 cm od levého okraje papíru a 4-13 cm od dolního okraje. Dále je třeba narýsovat kladně orientovaný trojúhelník \(XYZ\) dle zadaných rozměrů tak, aby strana \(XY\) byla vodorovná. Dodržíme-li toto umístění, řešení úlohy se vejde na papír.
V levém menu jsou odkazy na jednotlivé kapitoly. Pro snadnější orientaci je většina kapitol rozdělena do podkapitol, jejichž nabídka se zobrazí v pravém menu konkrétní kapitoly.
V kapitole Řešení úloh si můžete prohlédnout řešení vybraných úloh.
Průnik přímky s tělesem určíme tak, že danou přímkou proložíme libovolnou rovinu a sestrojíme řez tělesa touto rovinou. Body, ve kterých přímka protíná hranici řezu, určují průnik přímky s tělesem.
Budeme se zabývat i vhodností rovin zvolených k pomocnému řezu. Pro průniky jehlanů a kuželů ukážeme volbu vrcholové roviny, průniky hranolů a válců vyřešíme pomocí směrových rovin.
10.1 Průnik přímky s mnohostěnem
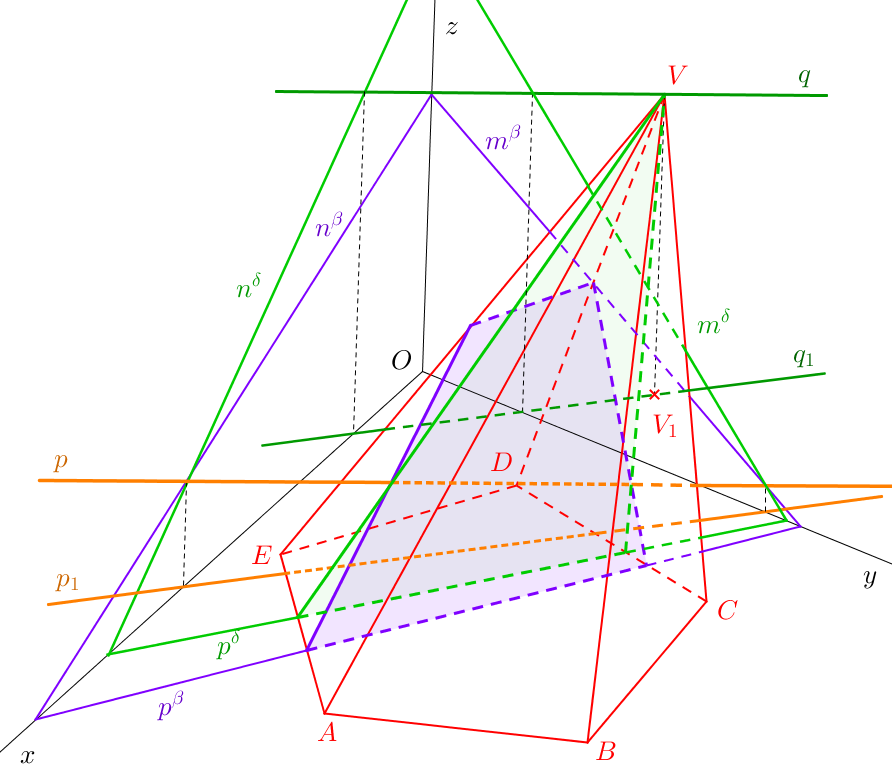
K nalezení průniku přímky \(p\) s jehlanem proložíme přímkou \(p\) libovolnou rovinu \(\beta\) a sestrojíme řez jehlanu touto rovinou. Průsečíky řezu s přímkou \(p\) jsou krajní body průniku přímky \(p\) s jehlanem.
Rovina \(\delta\) na obr. 10.1 je vrcholová rovina, tzn. rovina, která obsahuje hlavní vrchol jehlanu. Konstrukce řezu jehlanu vrcholovou rovinou je obvykle jednodušší než konstrukce řezu jinou rovinou. Řezem je totiž vždy trojúhelník. Vrcholy řezu jsou hlavní vrchol jehlanu a průsečíky půdorysné stopy roviny \(\delta\) s obvodem podstavy jehlanu (za předpokladu, že podstava jehlanu leží v půdorysně).
Vrcholová rovina \(\delta\) je zadána přímkou \(p\) a vrcholem \(V\). Na obr. 10.1 je vrcholem \(V\) vedena přímka \(q\) rovnoběžná s přímkou \(p\). Průsečíky přímek \(p\), \(q\) s nárysnou (resp. s bokorysnou) prochází nárysná (bokorysná) stopa roviny \(\delta\). Nyní jsme schopni zobrazit půdorysnou stopu vrcholové roviny \(\delta\). Místo rovnoběžky \(q\) lze vést vrcholem \(V\) přímku různoběžnou s přímkou \(p\) - ideálně tak, aby se její půdorysný stopník vešel do výkresu. Dále nemusíme hledat nárysnou ani bokorysnou stopu vrcholové roviny. K řešení průniku nám postačí půdorysná stopa vrcholové roviny jako spojnice půdorysných stopníků přímek určujících rovinu.
Ani při řešení průniku přímky s tělesem nesmíme zapomenout na viditelnost. Je-li přímka vně tělesa, musíme rozhodnout, zda leží před tělesem, nebo za ním. Pokud průsečík přímky s tělesem leží ve stěně tělesa, která je vidět, přímka vycházející z tělesa tímto bodem je rovněž vidět. Pokud průsečík leží ve stěně, která vidět není, není vidět ani tento průsečík. Přímka je zde neviditelná až do části, kde její průmět vychází ven z průmětu tělesa.
Úloha 55. \(X\)[5-13; 3-20], \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=5\). Je dán pravidelný trojboký jehlan \(ABCV\) s podstavou v nárysně. Výška jehlanu \(v = 7\), body \(A=[4;0;3]\), \(B=[1;0;6]\) (viz úloha 40). Dále jsou dány body \(N^{q} = [7;0;6]\), \(M^{q} = [0;6;6]\). Sestrojte průnik jehlanu s přímkou \(q = \leftrightarrow N^{q}M^{q}\). ŘEŠENÍ
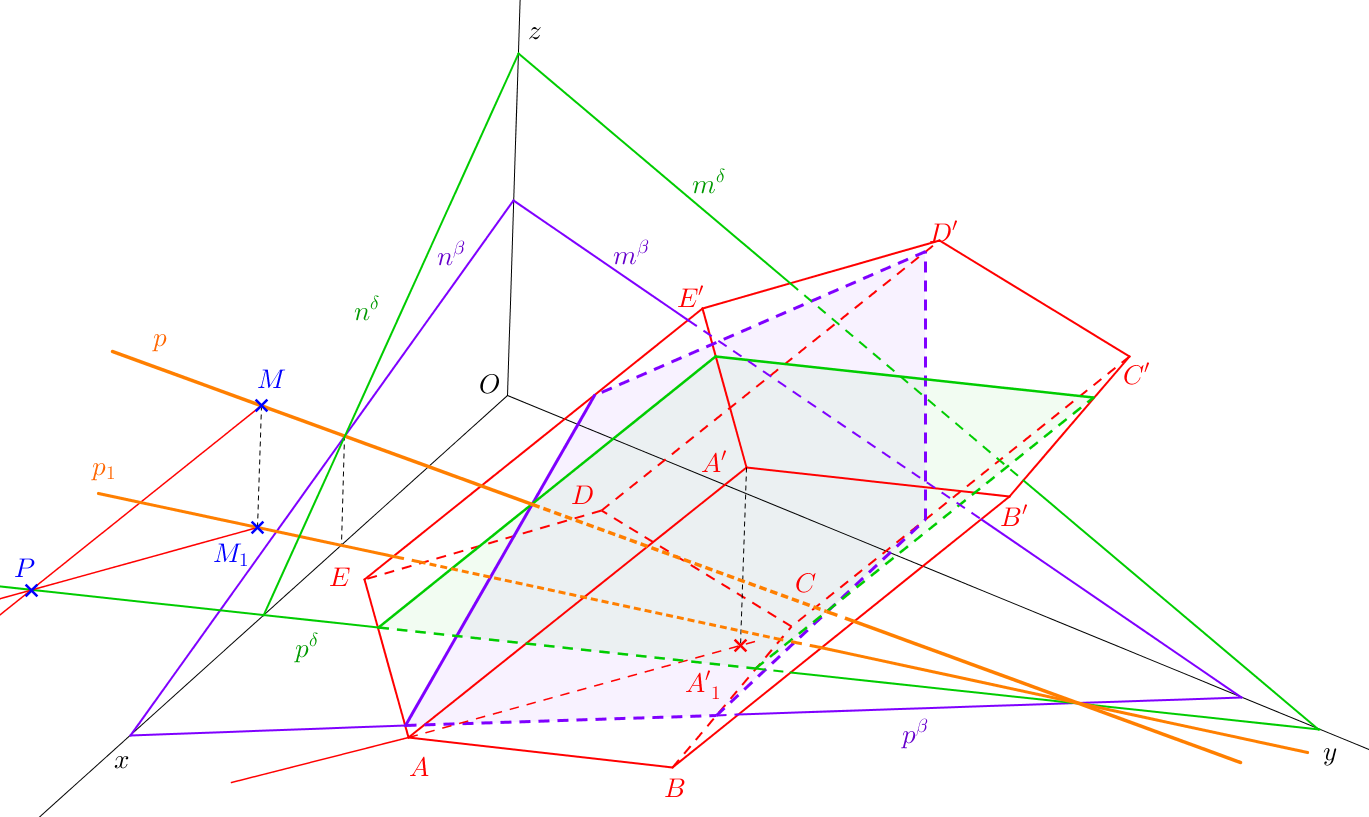
Na obr. 10.2 je zobrazen průnik přímky \(p\) s hranolem \(ABCDEA'B'C'D'E'\). Je zvolena obecná rovina \(\beta\) procházející přímkou \(p\) a sestrojen řez hranolu touto rovinou. Průnikem přímky \(p\) s hranolem je její průnik s řezem hranolu rovinou \(\beta\).
Půdorysnou stopu směrové roviny \(\delta\) najdeme tak, že libovolným bodem \(M\) přímky \(p\) vedeme přímku \(q\) rovnoběžnou s boční hranou hranolu. Půdorysnými stopníky přímek \(q\) a \(p\) proložíme půdorysnou stopu \(p^\delta\) roviny \(\delta\). Půdorysná stopa \(p^\delta\) určí stranu řezu, která leží v dolní podstavě hranolu. Další dvě strany řezu jsou rovnoběžné s bočními hranami hranolu a prochází průsečíky stopy \(p^\delta\) s podstavnými hranami hranolu. Poslední strana řezu leží v horní podstavě hranolu a je rovnoběžná s půdorysnou stopou roviny \(\delta\).
Úloha 56. \(X\)[4-10; 5-16], \(\triangle XYZ\): \(|XY|=8,5\), \(|YZ|=8\), \(|XZ|=5\). Je dán pravidelný šestiboký hranol \(ABCDEFA'B'C'D'E'F'\) jehož podstava leží v bokorysně. Bod \(A=[0;4;3]\), střed podstavy \(S=[0;4;6]\), výška hranolu \(v = 7\) (viz úloha 37). Dále jsou dány body \(N^{m}=[5;0;5]\), \(M^{m}=[0;9;7]\). Sestrojte průnik hranolu s přímkou \(m = \leftrightarrow N^{m}M^{m}\). ŘEŠENÍ
Úloha 57. \(X\)[5-8; 3-19], \(\triangle XYZ\): \(|XY|=7\), \(|YZ|=8\), \(|XZ|=9\). Jsou dány body \(A=[4;0;2]\), \(B=[4;0;6]\), \(C=[7;0;8]\), \(K=[8;8;8]\), \(L=[6;4;2]\) a délka \(v=9\). Sestrojte průnik přímky \(KL\) s kolmým hranolem \(ABCA'B'C'\). Výška hranolu je \(v\).
10.2 Průnik přímky s rotačním tělesem
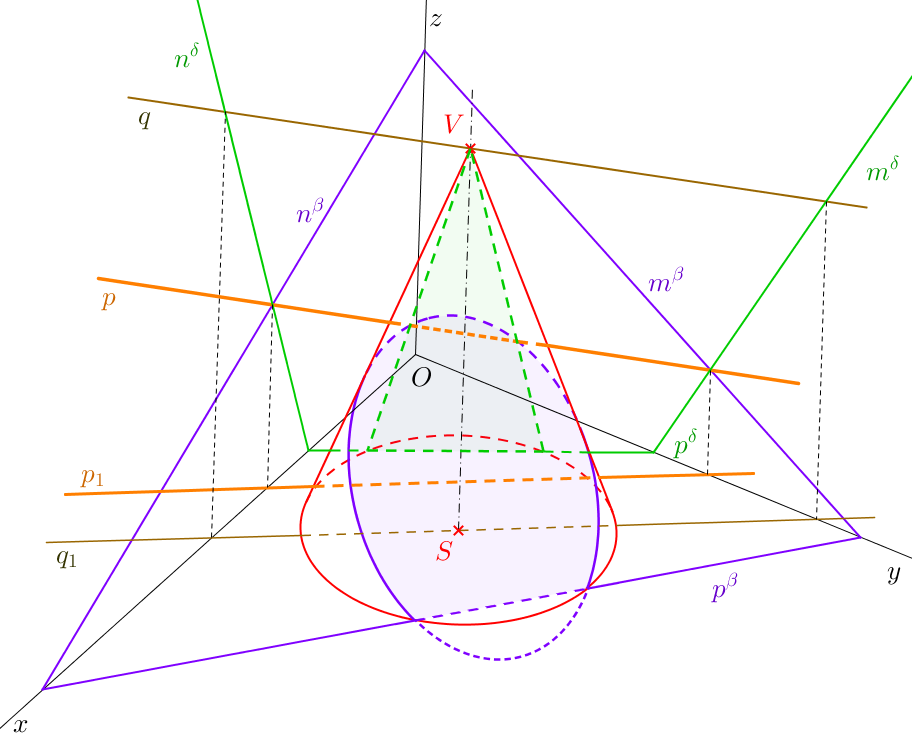
Průnik přímky s rotačním tělesem najdeme stejně jako průnik přímky s mnohostěnem: zvolíme rovinu, která danou přímku obsahuje, a sestrojíme řez tělesa touto rovinou. Průnikem přímky s tělesem je její průnik s řezem. Vzhledem k obtížnější konstrukci řezu je ale nevýhodné volit u válců/kuželů jinou rovinu, než směrovou/vrcholovou (obr. 10.3 a 10.4).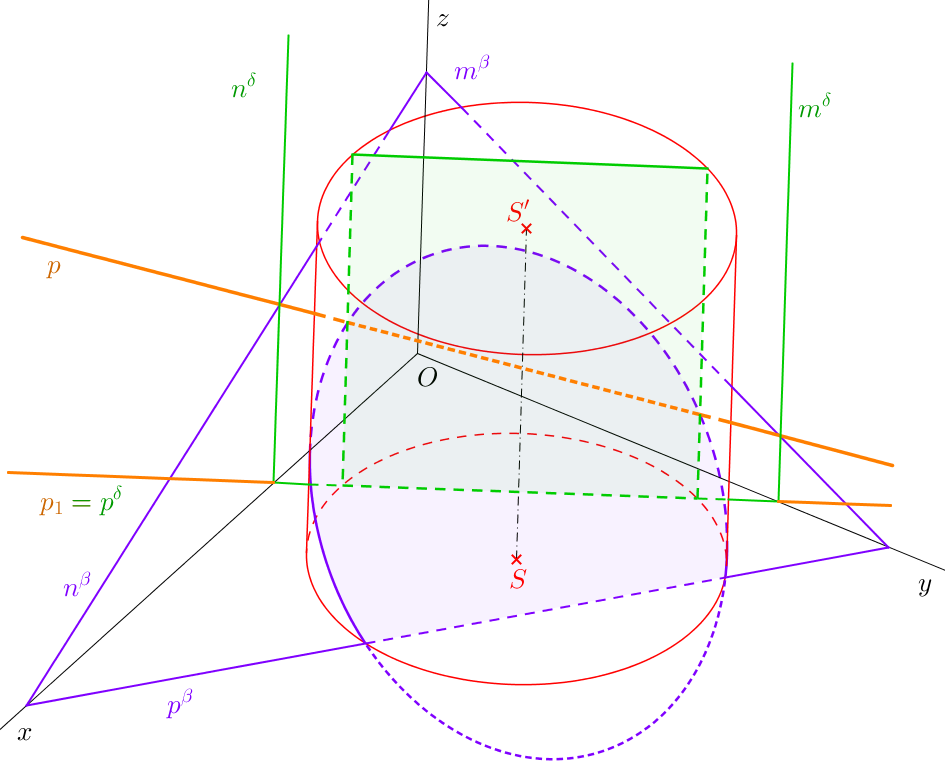
Úloha 58. \(X\)[7-12; 7-19], \(\triangle XYZ\): \(|XY|=4\), \(|YZ|=5\), \(|XZ|=6\). Je dán rotační válec, jehož podstava se středem \(S = [8;8;0]\) a poloměrem \(r=3\) leží v půdorysně, výška válce je \(v=7\) (viz úloha 43). Dále jsou dány bod \(N=[6;0;7]\), \(L=[8;9;3]\). Sestrojte průnik válce s přímkou \(k = \leftrightarrow NL\). ŘEŠENÍ
Úloha 59.
\(X\)[4-9; 6-19],
\(\triangle XYZ\):
\(|XY|=9\), \(|YZ|=9\), \(|XZ|=9\).
Jsou dány body \(S=[2;0;1]\), \(K=[4;2;1]\), \(L=[1;1;8]\) a délky \(r=6\), \(v=5\).
Sestrojte rotační válec, jehož podstava se středem \(S\) a poloměrem \(r\) leží v nárysně. Výška válce je \(v\). Sestrojte průnik válce s přímkou \(KL\).
Úloha 60. \(X\)[3-9; 2-18], \(\triangle XYZ\): \(|XY|=8,5\), \(|YZ|=8\), \(|XZ|=5\). Je dán rotační kužel s podstavou v půdorysně. Střed podstavy \(S=[0;0;0]\), poloměr podstavy \(r=3\), výška kužele \(v=10\) (viz úloha 45). Dále jsou dány body \(M=[0;4;6]\), \(N=[1;0;4]\). Sestrojte průnik kužele s přímkou \(l=\leftrightarrow MN\). ŘEŠENÍ

Nyní můžeme říci, že pravoúhlá axonometrie je vzájemně jednoznačné zobrazení bodů prostoru na uspořádané dvojice průmětů.

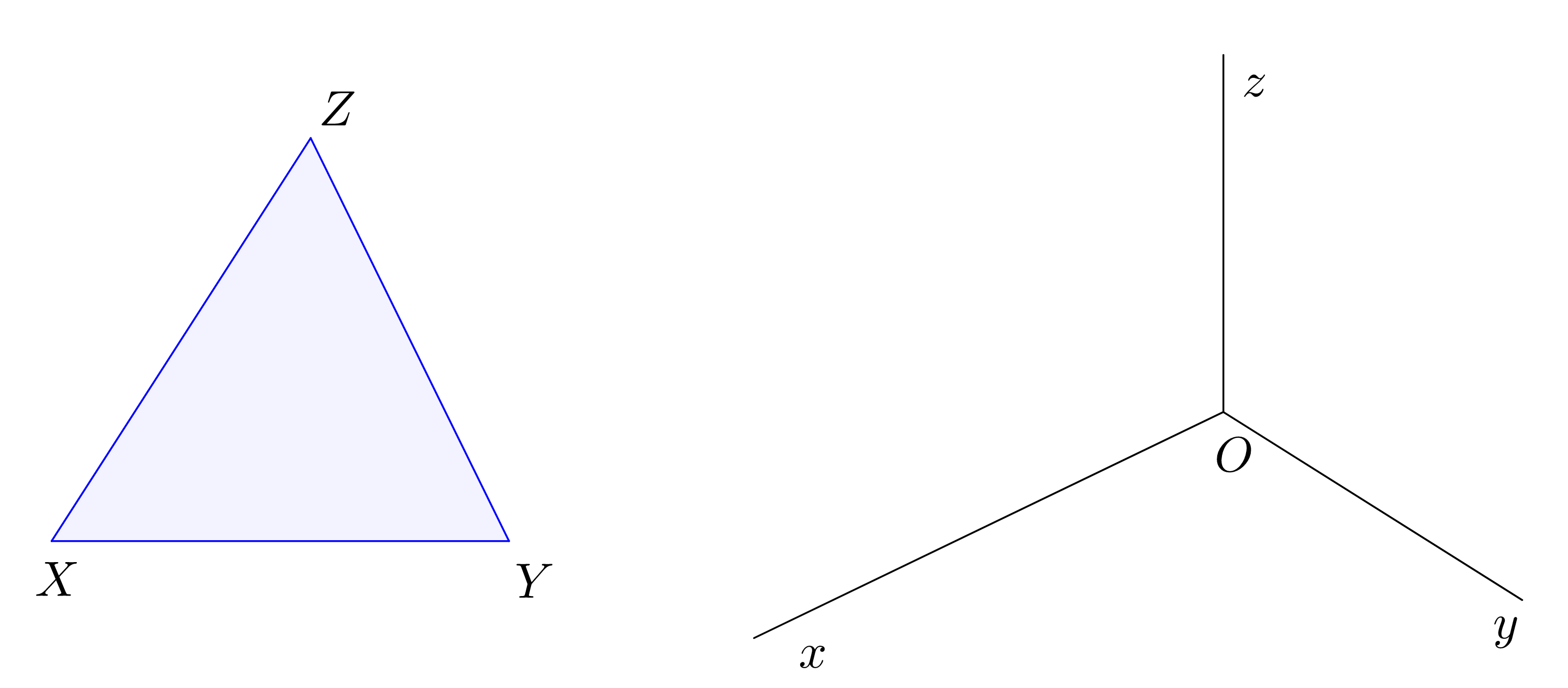
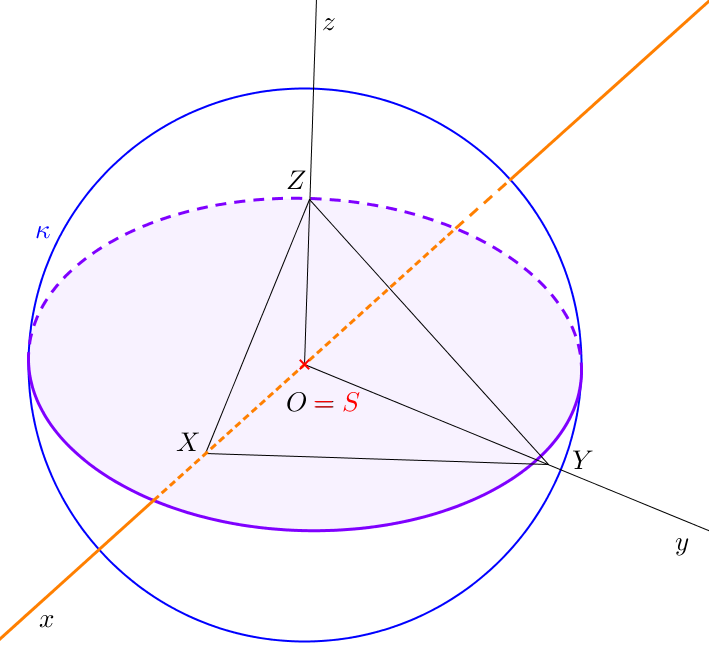
Pravoúhlou axonometrii můžeme zadat axonometrickou rovinou nebo axonometrickým osovým křížem, tedy axonometrickými průměty os \(x\), \(y\), \(z\) (obr. 2.3).
Úloha 1. \(X\)[3-7; 4-13], \(\triangle XYZ\): \(|XY|=11\), \(|YZ|=17\), \(|XZ|=15\). Sestrojte axonometrický osový kříž.

V našich konstrukcích se omezíme pouze na axonometrický nadhled. V zadání úloh tedy nebudeme uvádět, že jde o nadhled, budeme to ale předpokládat.
Pro zobrazení jednoho bodu je průsečná metoda zbytečně obtížná. Zato k zobrazení složitějších těles je velmi praktická a přehledná. Příklad můžeme vidět na obr. 11.2, kde jsme pro porovnání použili vysunutý bokorys namísto nárysu. Průsečnou metodou najdeme průměty všech vrcholů tělesa, které spojíme hranami.

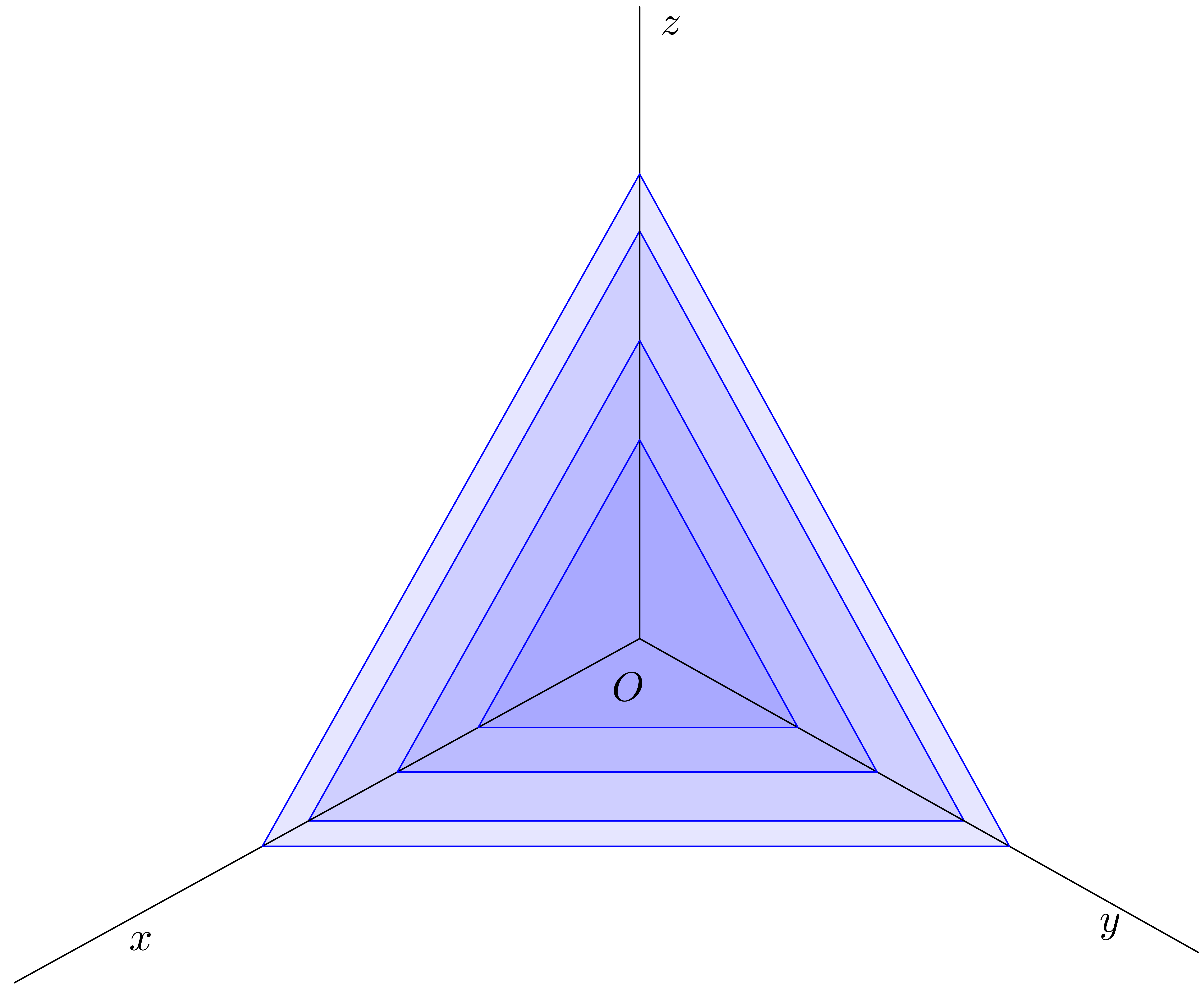
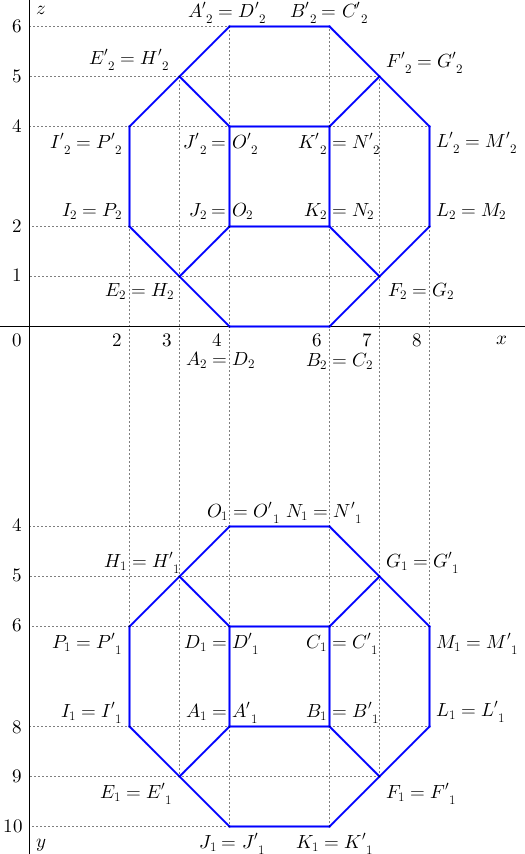
Úloha 61. \(X\)[10; 19], \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=8\). Jsou dány průměty komolého osmistěnu v Mongeově promítání (obr. 11.4). Pro lepší představu tělesa může posloužit obr. 11.3. Zobrazte těleso v pravoúhlé axonometrii. ŘEŠENÍ

3.1 Otočení pomocné průmětny
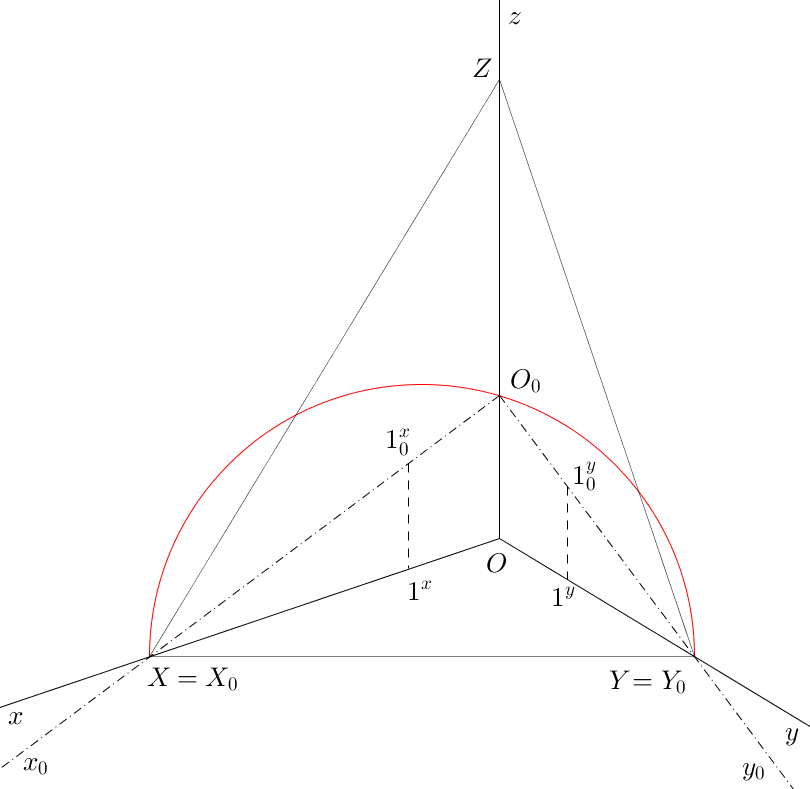
Mezi axonometrickým průmětem půdorysny a jejím otočením platí afinita, jejíž osou je přímka \(XY\), směrem průmět axonometrické osy \(z\) a afinně sdruženými body jsou body \(O\), \(O_{0}\).
Obdobně můžeme do axonometrické průmětny otočit i nárysnu \(\nu\) a bokorysnu \(\mu\).
Úloha 2. \(X\)[3-7; 4-13], \(\triangle XYZ\): \(|XY|=11\), \(|YZ|=17\), \(|XZ|=15\). Určete jednotky na osách \(x\), \(y\). (Otočte půdorysnu do axonometrické průmětny.)
Úloha 3. \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=5\). Určete jednotky na osách \(x\), \(y\). (Otočte půdorysnu do axonometrické průmětny.)
Úloha 4. \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=5\). Určete jednotky na osách \(x\), \(z\). (Otočte nárysnu do axonometrické průmětny.)
Úloha 5. \(\triangle XYZ\): \(|XY|=8,5\), \(|YZ|=8\), \(|XZ|=5\). Určete jednotky na osách \(y\), \(z\). (Otočte bokorysnu do axonometrické průmětny.)
3.2 Sklopení promítací roviny osy
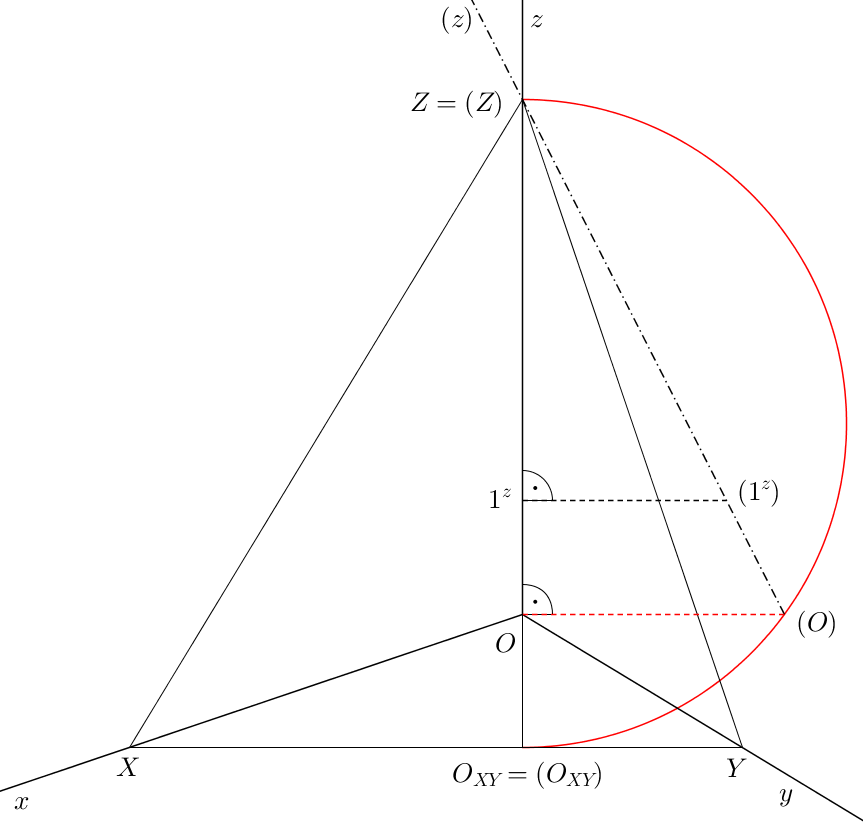
Další jednotky můžeme nanášet jako násobky jednotky \(1^{z}\) nebo je přeneseme kolmo ze sklopených jednotek nanesených ve skutečné velikosti na sklopenou osu \(z\).
Stejně jako jsme sklopili promítací rovinu osy \(z\), můžeme sklopit i promítací roviny os \(x\), \(y\).
Úloha 6. \(X\)[3-7; 4-13], \(\triangle XYZ\): \(|XY|=11\), \(|YZ|=17\), \(|XZ|=15\). Určete jednotky na ose \(z\). (Sklopte osu \(z\) do axonometrické průmětny.)
Úloha 7. \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=5\). Určete jednotky na ose \(z\). (Sklopte osu \(z\) do axonometrické průmětny.)
Úloha 8. \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=5\). Určete jednotky na ose \(y\). (Sklopte osu \(y\) do axonometrické průmětny.)
Úloha 9. \(\triangle XYZ\): \(|XY|=8,5\), \(|YZ|=8\), \(|XZ|=5\). Určete jednotky na ose \(x\). (Sklopte osu \(x\) do axonometrické průmětny.)
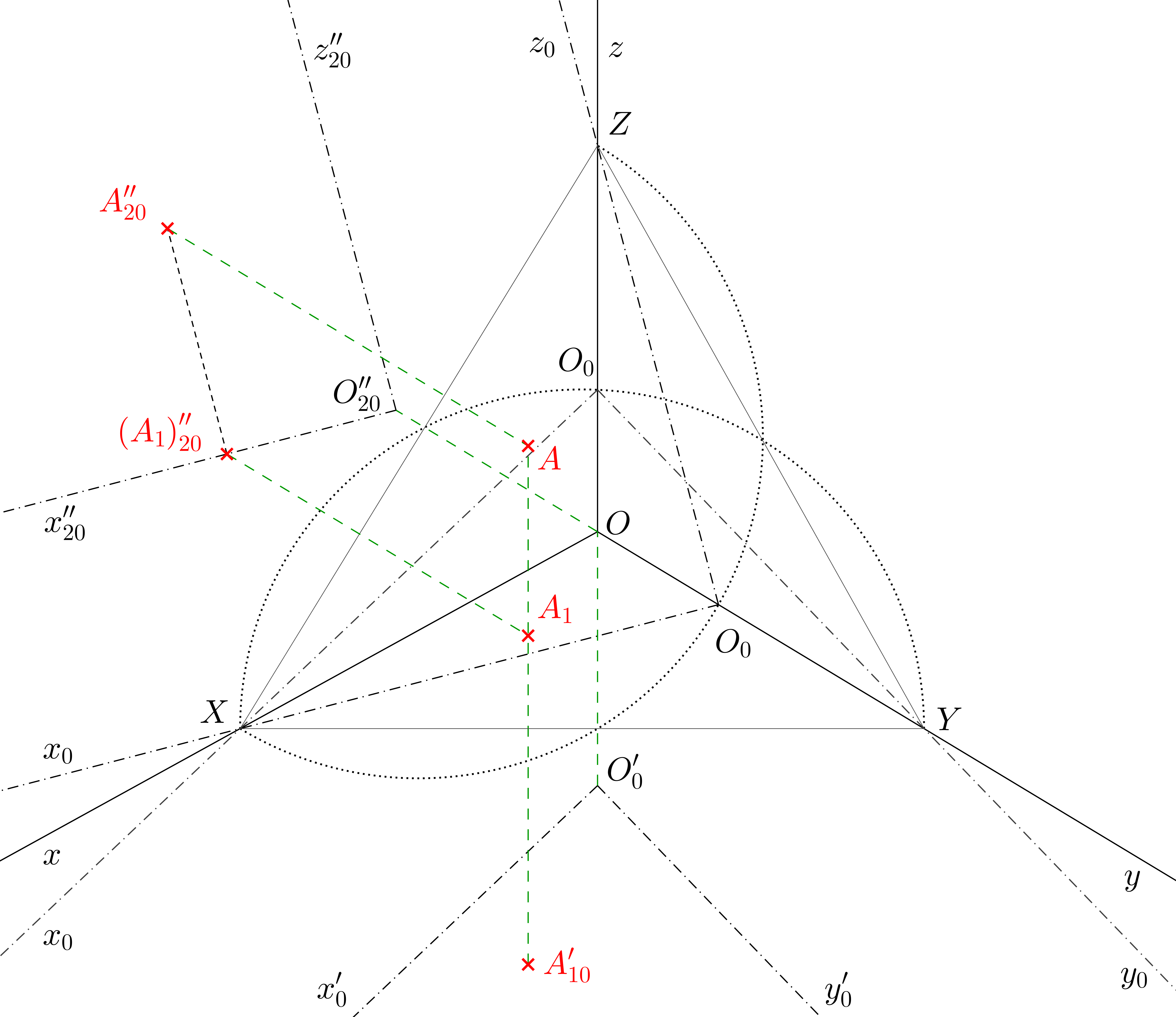
3.3 Průmět bodu
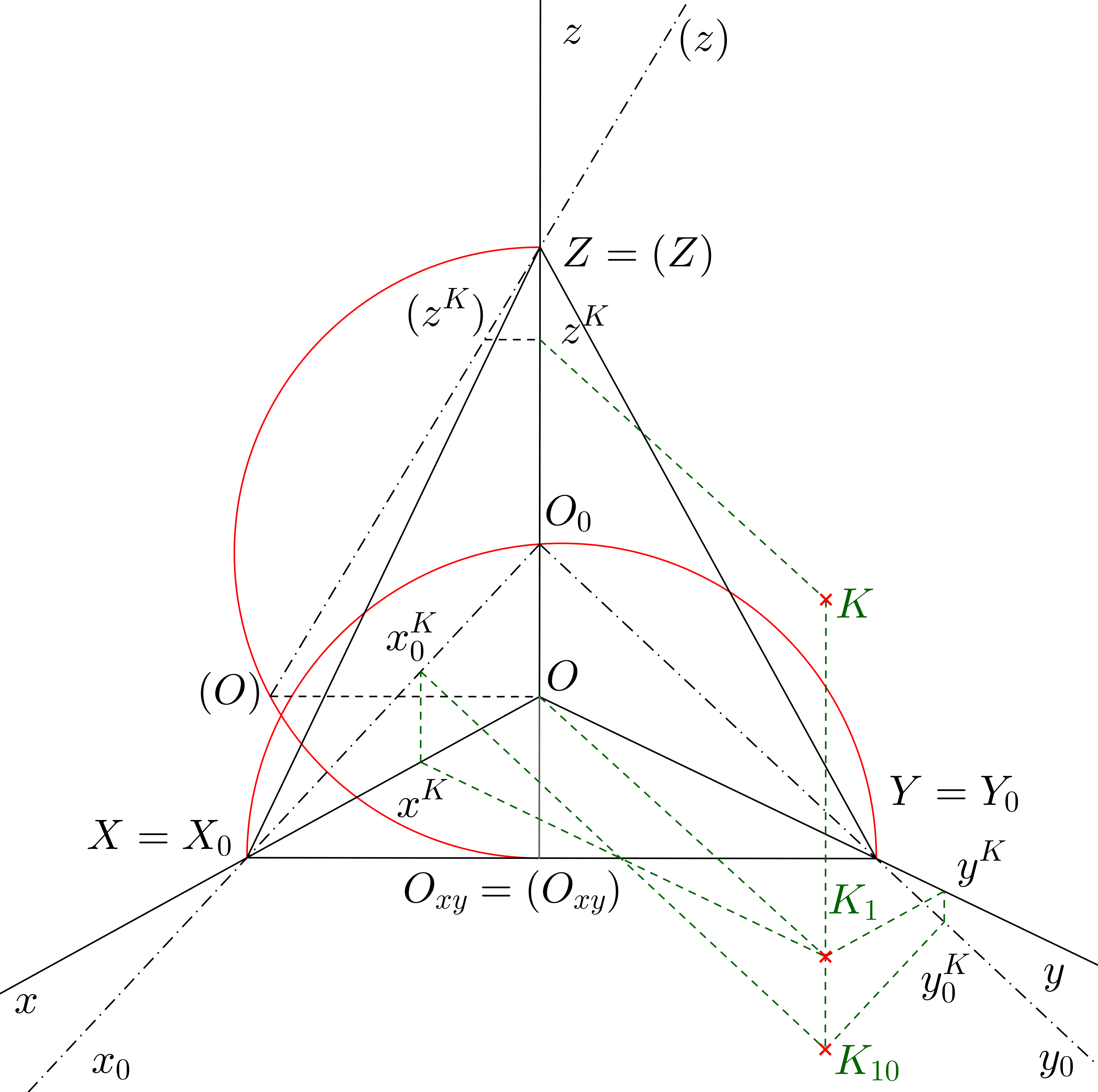
Spojnice axonometrického průmětu bodu s jeho axonometrickým půdorysem (na obr. 3.4 je to přímka \( KK_1\)) se nazývá ordinála.
Chceme-li zobrazit více bodů, je vhodné použít již zmíněnou afinitu mezi otočenou půdorysnou a axonometrickou půdorysnou (porovnání viz obr. 4.2 a 4.3).
Volba této kombinace (otočení půdorysny a sklopení promítací roviny osy \(z\)) je velmi výhodná vzhledem ke skutečnosti, že během konstrukce axonometrického bodu získáme i jeho axonometrický půdorys.
Úloha 10. \(\triangle XYZ\): \(|XY|=6\), \(|YZ|=7\), \(|XZ|=5\). Zobrazte body \(B=[1;0;6]\), \(F=[4;2;5]\).
Úloha 11. \(\triangle XYZ\): \(|XY|=8,5\), \(|YZ|=8\), \(|XZ|=5\). Zobrazte bod \(A=[0;4;3]\).
- Jste zde:
-
Úvodní stránka

-
Řešení úloh
- Uncategorised